
El robot humanoide con sello costarricense es capaz de interactuar con personas y apoyar tareas cotidianas, industriales y comerciales.

Un grupo de estudiantes de la Universidad de Costa Rica pasó más de una década construyendo algo que parecía ciencia ficción: un robot humanoide capaz de ayudar a las personas en tareas cotidianas. Hoy, ese esfuerzo se consolida como uno de los mayores hitos tecnológicos desarrollados en el país.


Con un trabajo único en su tipo en Centroamérica, el Arcos-Lab del Instituto de Investigación de Ingeniería (INII) y de la Escuela de Ingeniería Eléctrica de la Universidad de Costa Rica (UCR) destaca por alcanzar un hito: estudiar, diseñar y crear robots y sistemas cognitivos que ayuden a las personas en tareas de la vida diaria y en procesos industriales y comerciales.
Desde el año 2012, y con un enfoque interdisciplinario de alto nivel (Ingeniería Eléctrica, Mecánica, Ciencias de la Computación, Neurociencias, Ciencias Sociales y otras), el Arcos-Lab ha trabajado arduamente en el desarrollo de un robot humanoide capaz de ubicarse en el espacio en el que se encuentra y de comunicarse, interactuar con objetos y personas, y ejecutar tareas en ambientes cotidianos.
Durante más de una década, los investigadores y estudiantes del Arcos-Lab se han enfocado en el estudio y creación de hardware especializado que requiere el robot para que sea seguro en el ambiente físico, así como en el desarrollo de un software que le permita interactuar y realizar tareas cotidianas para ayudar al ser humano.
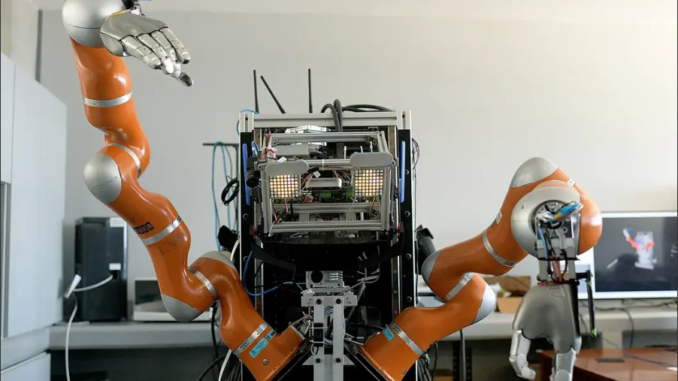
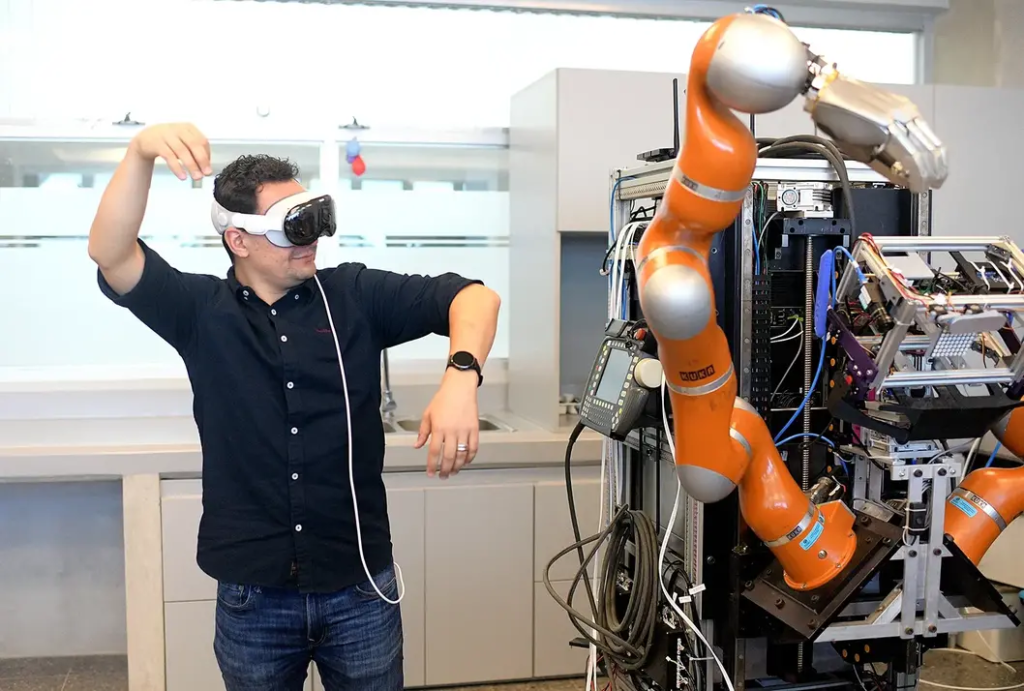
Hasta ahora, dentro de los principales logros está el estudio, el diseño y creación de un robot humanoide, que se ha desarrollado desde cero, es decir que es una innovación con sello de la UCR, y al cual se le ha integrado partes como los brazos y manos (la única parte que sí fue traída del extranjero), la plataforma omnidireccional, el torso, la cabeza, el cuello, la plataforma de distribución eléctrica, entre otros, así como la creación de una interfaz humano-máquina de integración y teleoperación de plataformas virtuales y robóticas.
El Dr. Federico Ruiz Ugalde, coordinador del Arcos-Lab aseguró que el trabajo de este laboratorio sobresale ya que se han centrado en investigar, crear y configurar el robot desde cero, de forma que pueda realizar tareas de manera eficiente.
“El diseño del robot es completamente nuestro, fue una construcción y ensamblaje de las diferentes partes desde cero para poder hacer que el robot tenga capacidades elevadas de manipulación suave de los objetos e interactué de forma amable con las personas, y se puede decir que es un desarrollo único en Latinoamérica” dijo Ruiz.
Por ejemplo, como parte del desarrollo del cuerpo del robot se ejecutaron 20 millones de objetivos manipulativos en simulación para determinar la mejor configuración el montaje para los brazos y manos del robot, también se diseñó y fabricó la cabeza del robot, la cual permite percibir los objetos y cuenta con varios sensores, entre ellos cámaras de alta velocidad, alta resolución, tridimensionales, así como una cámara térmica que le permiten al robot capturar información muy variada y completa de su entorno.
Asimismo, el investigador explicó que se encuentran estudiando la forma de que el robot interactué y se desempeñe en tres escenarios: una cocina inteligente, una tienda de minoreo y una mesa de trabajo conjunta con el ser humano.
“En particular nosotros tenemos interés en desarrollar modelos físicos utilizando matemática e inteligencia artificial (machine learning), para saber cómo se comportan los objetos a la hora de manipularlos, y que el robot pueda predecir cómo los objetos se comportan y también, con base en esa predicción, decidir cómo el robot va a actuar sobre esos objetos” explicó Ruiz.
ARCOS Lab UCR
El ARCOS Lab de la Universidad de Costa Rica se ha centrado en investigar, crear y configurar el robot humanoide desde cero, de forma que pueda realizar tareas de manera eficiente.
Actualmente, el Arcos-Lab estudia e investiga temas como el desarrollo de escenarios de pruebas y tareas para aplicaciones de robótica colaborativa entre robots; entrenamiento para que los robots automaticen ciertas tareas; en el aumento de capacidades manipulativas utilizando una configuración cinemática asimétrica, es decir la asimetría en la manipulación robótica y la creación de un nuevo robot con capacidades manipulativas asimétricas; en la creación de un método para estimar el contacto externo, la posición y magnitud, y la manipulación suave a la plataforma y el torso de un robot humanoide, entre otros.
También se espera a futuro desarrollar otras líneas de investigación con respecto a temas de robótica de campo como en agricultura y construcción.

La idea de todas estas investigaciones es conseguir que el robot perfeccione sus capacidades hasta que pueda desarrollar tareas cotidianas, y ayudar al comercio, la industria e incluso hasta en tareas médicas.
Actualmente el robot humanoide está completamente finalizado y se espera que este prototipo de robot humanoide, así como el nuevo robot asimétrico sean la base para hacer una transferencia de conocimiento a una organización o empresa que quiera implementarlo para asistir a personas en sus trabajos, tareas de la vida cotidiana y de ayudar a adultos mayores o personas con discapacidad.
Este laboratorio es único en su tipo a nivel regional, muchos estudiantes de diferentes carreras han tenido la oportunidad de sumarse al mundo de la robótica gracias al trabajo del Arcos-Lab.

¿Cómo surgió la iniciativa y cuál fue el proceso que se llevó a cabo para el desarrollo del Robot Humanoide?
Dr. Federico Ruiz, encargado del ARCOS- lab UCR
“El desarrollo del robot humanoide partió de una limitación clave que observamos cuando iniciamos en el 2014: aunque existían robots ya ensamblados en el mercado, no cumplían con los requisitos de seguridad ni con la capacidad de manipulación avanzada necesaria para interactuar con personas. Por ello, el equipo optó por integrar brazos y manos con “control suave”, una tecnología que permite a cada articulación detectar contactos con el entorno, garantizando un funcionamiento seguro.
Sin embargo, no existía un robot completo con estas características, por lo que fue necesario diseñar el resto del sistema. El proyecto consistió en dotar a esa plataforma manipulativa de movilidad, visión y una cabeza, además de desarrollar desde cero el montaje de los brazos y manos, el sistema eléctrico y la red de comunicación interna del robot. La distribución de energía y el intercambio de datos entre sus componentes fueron fundamentales para su funcionamiento.
Este proceso se realizó de forma gradual y contó con una fuerte participación estudiantil. Estudiantes de bachillerato, licenciatura y maestría en Ingeniería Eléctrica contribuyeron al diseño, construcción y prueba de prototipos, principalmente a través del curso Proyecto Eléctrico y de trabajos de tesis, convirtiendo al robot en un esfuerzo académico integral que reúne teoría, práctica e innovación tecnológica
Puedo decir que alrededor del 90% del trabajo y los resultados obtenidos en este laboratorio han sido gracias al aporte estudiantil, cada año recibimos estudiantes de distintas carreras y niveles que muchos de ellos donan su tiempo y a la vez aprenden en este laboratorio sobre temas de robótica y nos enorgullece decir que ha sido un espacio para también estimular a las mujeres ingenieras a participar de este tipo de desarrollos”.
Con información de Tatiana Carmona Rizo/UCR
Be the first to comment